You can not select more than 25 topics
Topics must start with a letter or number, can include dashes ('-') and can be up to 35 characters long.
198 lines
6.5 KiB
198 lines
6.5 KiB
---
|
|
comments: true
|
|
---
|
|
|
|
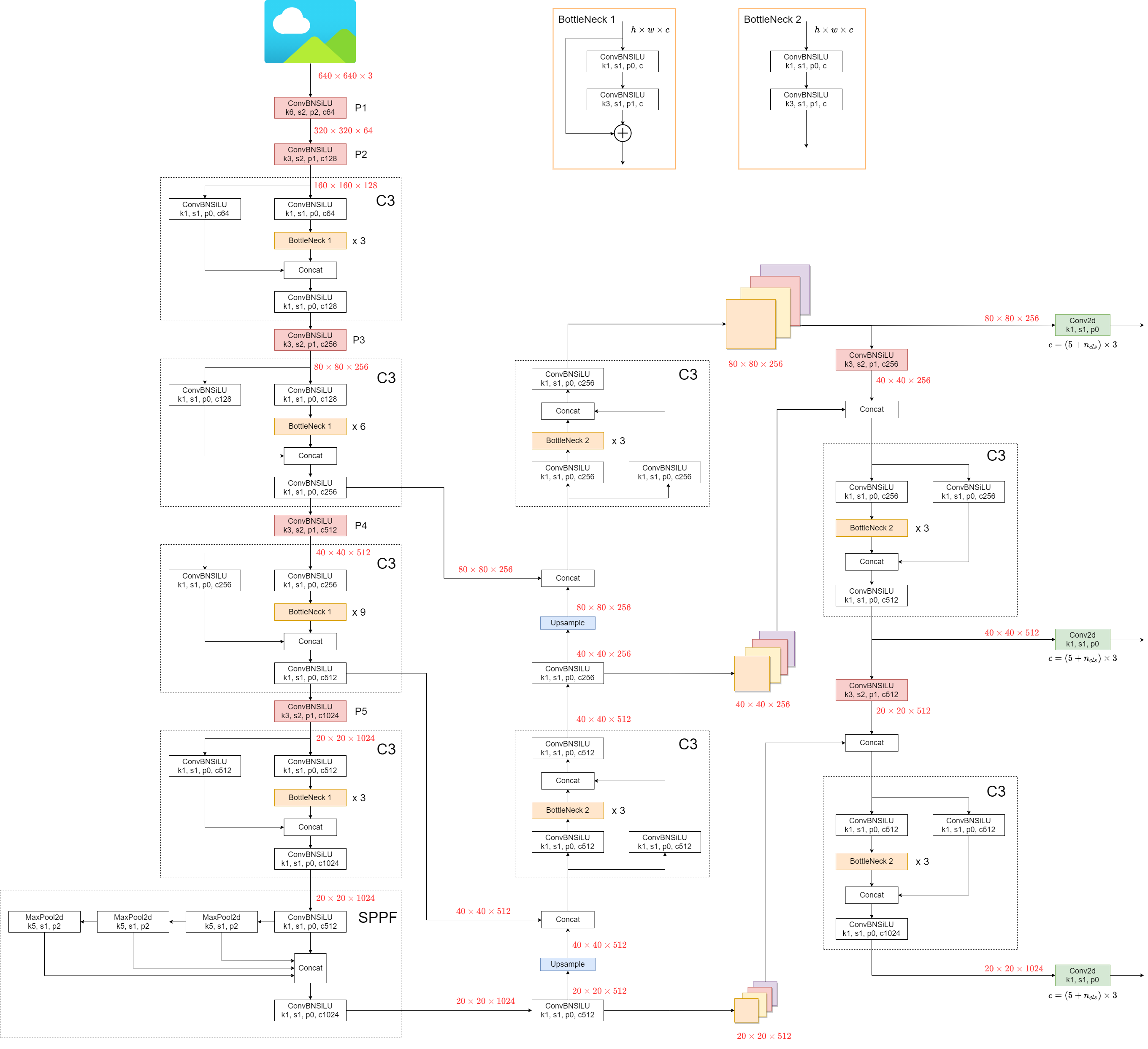
## 1. Model Structure
|
|
|
|
YOLOv5 (v6.0/6.1) consists of:
|
|
- **Backbone**: `New CSP-Darknet53`
|
|
- **Neck**: `SPPF`, `New CSP-PAN`
|
|
- **Head**: `YOLOv3 Head`
|
|
|
|
Model structure (`yolov5l.yaml`):
|
|
|
|
|
|
|
|
|
|
Some minor changes compared to previous versions:
|
|
|
|
1. Replace the `Focus` structure with `6x6 Conv2d`(more efficient, refer #4825)
|
|
2. Replace the `SPP` structure with `SPPF`(more than double the speed)
|
|
|
|
<details markdown>
|
|
<summary>test code</summary>
|
|
|
|
```python
|
|
import time
|
|
import torch
|
|
import torch.nn as nn
|
|
|
|
|
|
class SPP(nn.Module):
|
|
def __init__(self):
|
|
super().__init__()
|
|
self.maxpool1 = nn.MaxPool2d(5, 1, padding=2)
|
|
self.maxpool2 = nn.MaxPool2d(9, 1, padding=4)
|
|
self.maxpool3 = nn.MaxPool2d(13, 1, padding=6)
|
|
|
|
def forward(self, x):
|
|
o1 = self.maxpool1(x)
|
|
o2 = self.maxpool2(x)
|
|
o3 = self.maxpool3(x)
|
|
return torch.cat([x, o1, o2, o3], dim=1)
|
|
|
|
|
|
class SPPF(nn.Module):
|
|
def __init__(self):
|
|
super().__init__()
|
|
self.maxpool = nn.MaxPool2d(5, 1, padding=2)
|
|
|
|
def forward(self, x):
|
|
o1 = self.maxpool(x)
|
|
o2 = self.maxpool(o1)
|
|
o3 = self.maxpool(o2)
|
|
return torch.cat([x, o1, o2, o3], dim=1)
|
|
|
|
|
|
def main():
|
|
input_tensor = torch.rand(8, 32, 16, 16)
|
|
spp = SPP()
|
|
sppf = SPPF()
|
|
output1 = spp(input_tensor)
|
|
output2 = sppf(input_tensor)
|
|
|
|
print(torch.equal(output1, output2))
|
|
|
|
t_start = time.time()
|
|
for _ in range(100):
|
|
spp(input_tensor)
|
|
print(f"spp time: {time.time() - t_start}")
|
|
|
|
t_start = time.time()
|
|
for _ in range(100):
|
|
sppf(input_tensor)
|
|
print(f"sppf time: {time.time() - t_start}")
|
|
|
|
|
|
if __name__ == '__main__':
|
|
main()
|
|
```
|
|
|
|
result:
|
|
```
|
|
True
|
|
spp time: 0.5373051166534424
|
|
sppf time: 0.20780706405639648
|
|
```
|
|
|
|
</details>
|
|
|
|
|
|
|
|
## 2. Data Augmentation
|
|
|
|
- Mosaic
|
|
<img src="https://user-images.githubusercontent.com/31005897/159109235-c7aad8f2-1d4f-41f9-8d5f-b2fde6f2885e.png#pic_center" width=80%>
|
|
|
|
- Copy paste
|
|
<img src="https://user-images.githubusercontent.com/31005897/159116277-91b45033-6bec-4f82-afc4-41138866628e.png#pic_center" width=80%>
|
|
|
|
- Random affine(Rotation, Scale, Translation and Shear)
|
|
<img src="https://user-images.githubusercontent.com/31005897/159109326-45cd5acb-14fa-43e7-9235-0f21b0021c7d.png#pic_center" width=80%>
|
|
|
|
- MixUp
|
|
<img src="https://user-images.githubusercontent.com/31005897/159109361-3b24333b-f481-478b-ae00-df7838f0b5cd.png#pic_center" width=80%>
|
|
|
|
- Albumentations
|
|
- Augment HSV(Hue, Saturation, Value)
|
|
<img src="https://user-images.githubusercontent.com/31005897/159109407-83d100ba-1aba-4f4b-aa03-4f048f815981.png#pic_center" width=80%>
|
|
|
|
- Random horizontal flip
|
|
<img src="https://user-images.githubusercontent.com/31005897/159109429-0d44619a-a76a-49eb-bfc0-6709860c043e.png#pic_center" width=80%>
|
|
|
|
|
|
|
|
## 3. Training Strategies
|
|
|
|
- Multi-scale training(0.5~1.5x)
|
|
- AutoAnchor(For training custom data)
|
|
- Warmup and Cosine LR scheduler
|
|
- EMA(Exponential Moving Average)
|
|
- Mixed precision
|
|
- Evolve hyper-parameters
|
|
|
|
|
|
|
|
## 4. Others
|
|
|
|
### 4.1 Compute Losses
|
|
|
|
The YOLOv5 loss consists of three parts:
|
|
|
|
- Classes loss(BCE loss)
|
|
- Objectness loss(BCE loss)
|
|
- Location loss(CIoU loss)
|
|
|
|

|
|
|
|
### 4.2 Balance Losses
|
|
The objectness losses of the three prediction layers(`P3`, `P4`, `P5`) are weighted differently. The balance weights are `[4.0, 1.0, 0.4]` respectively.
|
|
|
|

|
|
|
|
### 4.3 Eliminate Grid Sensitivity
|
|
In YOLOv2 and YOLOv3, the formula for calculating the predicted target information is:
|
|
|
|
+c_x)
|
|
+c_y)
|
|

|
|

|
|
|
|
<img src="https://user-images.githubusercontent.com/31005897/158508027-8bf63c28-8290-467b-8a3e-4ad09235001a.png#pic_center" width=40%>
|
|
|
|
|
|
|
|
In YOLOv5, the formula is:
|
|
|
|
-0.5)+c_x)
|
|
-0.5)+c_y)
|
|
)^2)
|
|
)^2)
|
|
|
|
Compare the center point offset before and after scaling. The center point offset range is adjusted from (0, 1) to (-0.5, 1.5).
|
|
Therefore, offset can easily get 0 or 1.
|
|
|
|
<img src="https://user-images.githubusercontent.com/31005897/158508052-c24bc5e8-05c1-4154-ac97-2e1ec71f582e.png#pic_center" width=40%>
|
|
|
|
Compare the height and width scaling ratio(relative to anchor) before and after adjustment. The original yolo/darknet box equations have a serious flaw. Width and Height are completely unbounded as they are simply out=exp(in), which is dangerous, as it can lead to runaway gradients, instabilities, NaN losses and ultimately a complete loss of training. [refer this issue](https://github.com/ultralytics/yolov5/issues/471#issuecomment-662009779)
|
|
|
|
<img src="https://user-images.githubusercontent.com/31005897/158508089-5ac0c7a3-6358-44b7-863e-a6e45babb842.png#pic_center" width=40%>
|
|
|
|
|
|
### 4.4 Build Targets
|
|
Match positive samples:
|
|
|
|
- Calculate the aspect ratio of GT and Anchor Templates
|
|
|
|

|
|
|
|

|
|
|
|
)
|
|
|
|
)
|
|
|
|
)
|
|
|
|

|
|
|
|
<img src="https://user-images.githubusercontent.com/31005897/158508119-fbb2e483-7b8c-4975-8e1f-f510d367f8ff.png#pic_center" width=70%>
|
|
|
|
- Assign the successfully matched Anchor Templates to the corresponding cells
|
|
|
|
<img src="https://user-images.githubusercontent.com/31005897/158508771-b6e7cab4-8de6-47f9-9abf-cdf14c275dfe.png#pic_center" width=70%>
|
|
|
|
- Because the center point offset range is adjusted from (0, 1) to (-0.5, 1.5). GT Box can be assigned to more anchors.
|
|
|
|
<img src="https://user-images.githubusercontent.com/31005897/158508139-9db4e8c2-cf96-47e0-bc80-35d11512f296.png#pic_center" width=70%>
|